GPS载波相位测量静态绝对定位方程
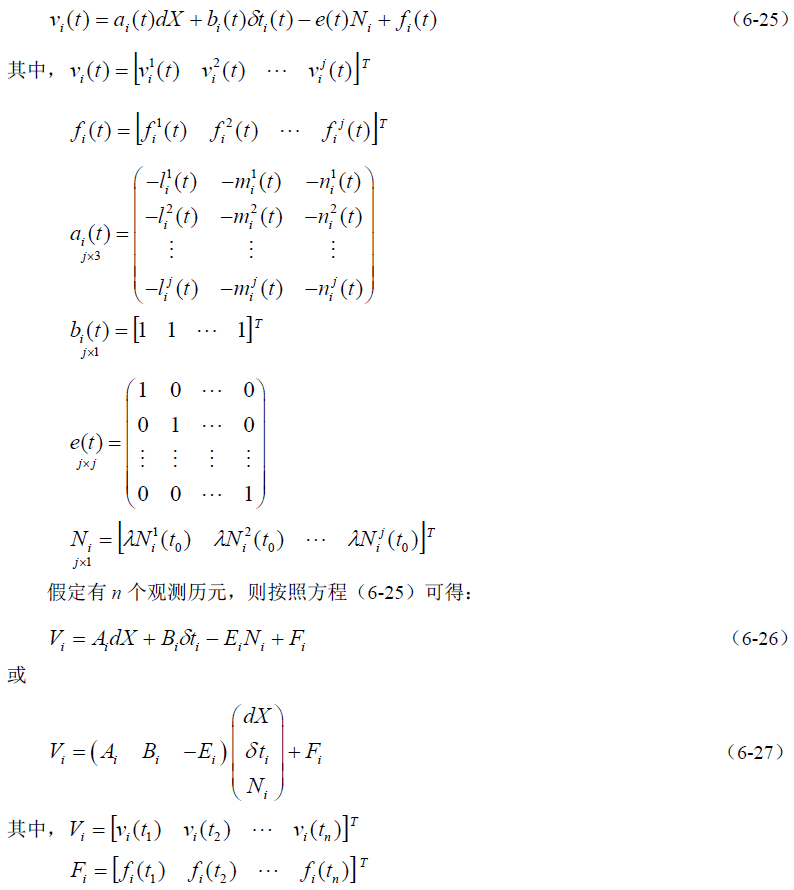
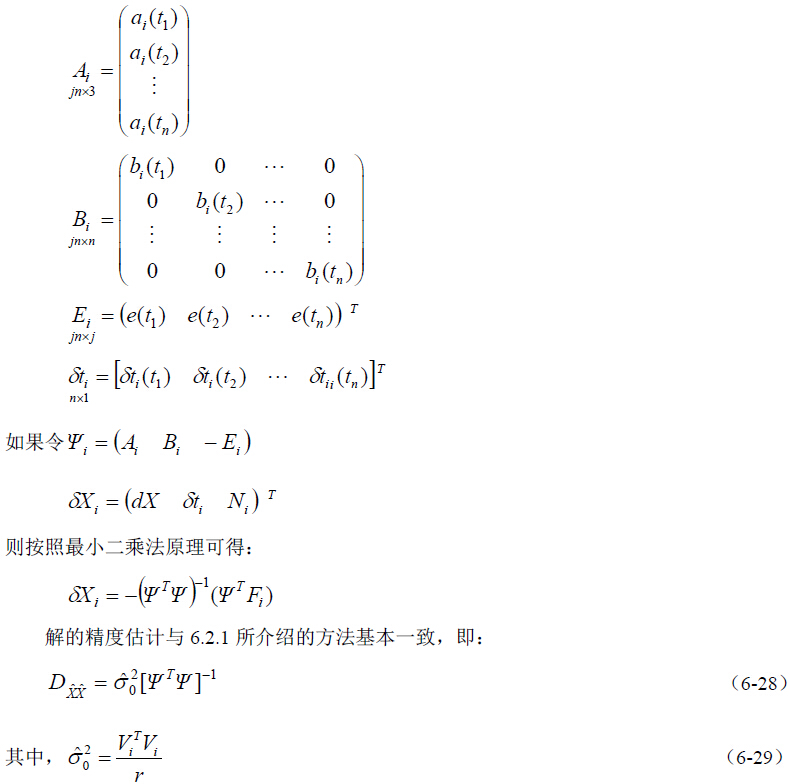
载波相位测量静态绝对定位与载波相位测量的动态绝对定位不同,后者在每个测站只有 一个历元的观测数据。一个观测历元时的误差方程就如(6-18)所示,为了推导方便,现将 (6-18)式变形为:
需要再次指出的是,GPS 静态定位时,随着观测时间的延长,可视卫星的数量很可能会 有所变化。所以,在组成GPS 平差模型时需要注意,每个历元观测到的卫星可能会有所差异。 出现这种情况,不但会增加新的未知数(如整周模糊度),而且可能还会降低解的精度。因 此,在观测过程或数据处理时,保持相同的一组卫星的观测量是比较适当的。
虽然采用了载波相位观测量,观测精度较高,但这并不一定意味着高精度的定位结果。 一方面,载波相位测量静态绝对定位的观测精度比较高,而且通过延长观测时间还可以进一 步增加多余观测;而另一方面,由于没有其它相邻测站的观测数据可资比较,卫星定轨误差 和大气折射等因素又制约了绝对定位的精度。因此,只有当卫星轨道精度较高(比如使用精 密星历),以及采用更精确、更完善的大气折射改正模型时,绝对定位才能达到比较理想的 精度。测相伪距静态绝对定位目前主要应用于测量中确定测站起始坐标。
尊敬的访客:如果您想了解或购买GPS定位 防盗产品,请点击下方按钮联系我们


您也可以直接拨打客服热线:4007-888-200
推荐阅读:
GPS应用于大型设备的超精密安装
GPS定位技术在精密工程测量中的应用
GPS定位技术在普通工程测量中的应用
GPS技术在工程测量中的应用
GPS定位在大地(控制)测量方面的应用



