GPS测码伪距静态绝对定位方程
与动态定位不同,静态定位时接收机保持静止。这样,一个测站点上可以获得连续多个 历元的观测值。有了更多的多余观测,对提高定位精度很有帮助。
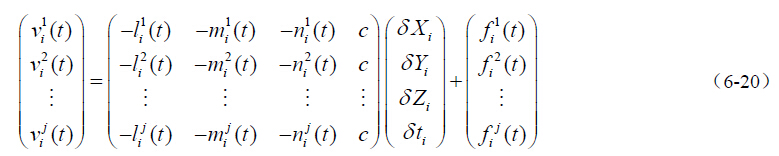
在只有一个观测历元时,由(6-7)式可得误差方程式:
如果有n 个观测历元,且每个历元观测相同的j 颗卫星,则误差方程式为:


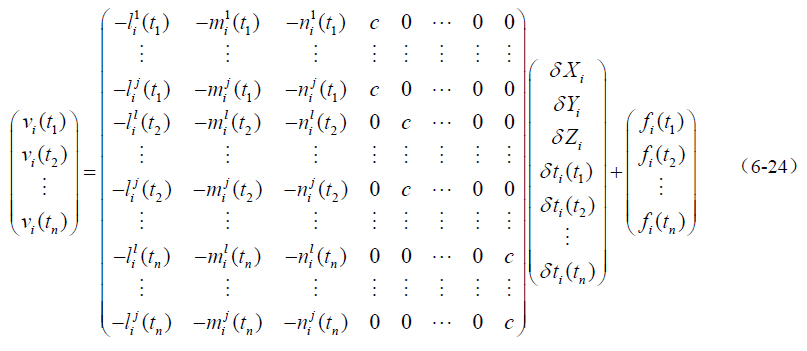
方程(6-24)的解算模型及步骤与(6-22)式基本一致,区别仅在于系数矩阵Ai 和未知 参数向量dZ 的变化。 顺便指出,随着观测历元的增加,每个历元可视卫星的数量可能发生变化。于是,系数矩阵的构成就和(6-24)式有所不同,这一点在组成系数矩阵和常数向量的时候应予顾及。
尊敬的访客:如果您想了解或购买GPS定位 防盗产品,请点击下方按钮联系我们


您也可以直接拨打客服热线:4007-888-200
推荐阅读:
GPS快速相对静态定位
GPS数据采集各主要作业模式的施测、精度及应用范围 经典
GPS经典静态相对定位法确定整周未知数
测码伪距动态相对定位原理及其观测方程
GPS静态相对定位观测方程



