GPS实时动态(RTK)相对定位系统
实时动态(RTK-Real Time Kinematic)测量系统,是基于载波相位测量的实时差分GPS测量技术,它是GPS 测量技术与数据传输技术相结合的组合系统,它实现了高精度和实时定位两个目标,是GPS 测量技术的重大突破。它的出现,使测绘工作一改过去先控制、后加密、再测图或工程放样的传统做法,使一步法自动化数字成图、工程放样一步到位成为现实,极大地提高了作业效率和减轻了劳动强度。
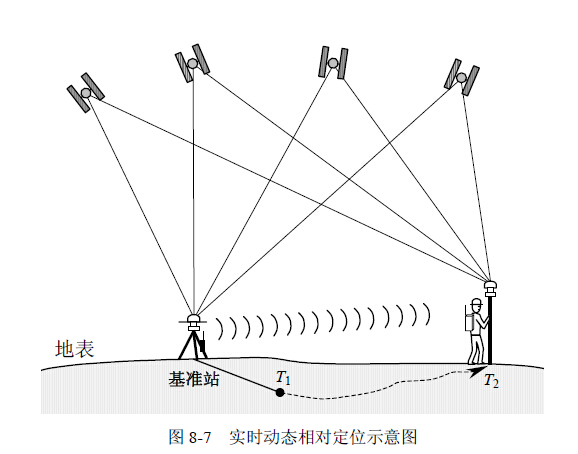
实时动态相对定位的基本原理是:在基准站(也称参考站,其在WGS-84 坐标系中的坐标精确已知)上安置一台GPS 接收机和传输数据的电台,接收机连续跟踪观测所有可见卫星,并借助电台将观测数据和基准站已知坐标信息发送给流动接收机;流动接收机将自己采集的GPS 观测数据和由电台接收的来自基准站的数据,组成差分观测值,并进行实时处理,求得流动站的瞬时三维位置,从而实现实时动态相对定位。这里所使用的收、发电台,通常称为数据链。
实时动态相对定位的作业过程如下:开始作业时,流动接收机可设置于某一固定点(不一定为坐标已知点)上,先静止观测数分钟,进行初始化,也可使用AROF 技术,在动态条件下完成初始化工作(一般需3~5min)。之后,流动接收机即可按预定路线和采样间隔,自动进行每历元的观测,将每历元采集的数据与基准站数据链传输过来的对应历元观测数据,实时地进行差分处理,便可求得流动接收机的实时位置。实时动态相对定位(RTK)作业示意图,如图8-7 所示。
为了进行RTK 作业,用户必须有以下配置(以Leica 公司的Wild300 为例):
1.硬件
(1)基准站接收机——传感器采用SR399(或SR399E 加外置天线AT-202)、CR344(或CR333)控制器。
(2)流动站接收机——SR399E 加外置天线AT-202、CR344(或CR333)控制器。(3)数据链——选择波特率不低于4 800bit/s 的无线通讯设备,其频率和功率取决于测程和测区环境。
(4)电源——基准站用交流市电或12VDC 汽车电瓶,流动站用GEB70/71 镍镉蓄电池或摩托车电瓶。
(5)计算机(用于数据后处理)——486 或更高台式计算机或便携机。
2.软件
(1)软件SKI——动态、静态通用后处理软件包。它包括系统结构、测量计划编制、项目管理、输入或输出管理、多基线平差处理、调阅与编辑等功能。
(2)加载于CR333(或CR344)控制器上的、可反复擦写的只读存储器中的Leica 300RTK软件。该软件是在RTDGOS 版本基础上开发的新软件,它兼容了RTDGPS 的全部功能,用户可根据精度要求选择RTDGPS(米级精度的码相位实时差分测量)或RTK 作业模式。它还允许用户在作业过程中随时变更作业模式。该软件可随着GPS 技术的发展而随时更新。
尊敬的访客:如果您想了解或购买GPS定位 防盗产品,请点击下方按钮联系我们


您也可以直接拨打客服热线:4007-888-200
推荐阅读:
GPS应用于大型设备的超精密安装
GPS定位技术在精密工程测量中的应用
GPS定位技术在普通工程测量中的应用
GPS技术在工程测量中的应用
GPS定位在大地(控制)测量方面的应用



