GPS准动态相对定位 Go and Stop
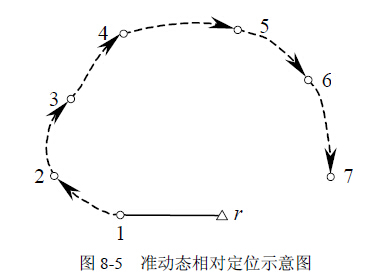
该定位模式的作业过程如下:在测区选 择一基准站r,在其上安置一台接收机,连 续跟踪观测所有可见卫星。安置另一台(或 多台)流动接收机于起始点1 上(如图8-5 所示),观测几分钟,以便快速确定其整周 未知数。此过程称为初始化。流动接收机完 成初始化后,则可按预定计划依次迁往各流 动站(2,3,⋯⋯),并在迁站过程中保持 对不少于4 颗卫星的连续跟踪(即保持所测 卫星的整周未知数不变),则每个流动站只 需观测几个历元(每秒钟测一次,只需几秒钟),便可以测定其相对于基准站的基线向量。 如果在观测过程中(包括迁站),某些卫星发生失锁,被测卫星少于4 颗,则可在待测 流动点上重新完成初始化(静止观测几分钟),然后继续往前测。流动站至基准站的距离, 目前以不大于15km 为宜。
这种作业模式的精度可达(10~20)mm+1(10-6)×D,其优点是速度比快速静态相对 定位更快;主要缺点是流动接收机在迁站过程中必须保持对卫星的跟踪,比较麻烦。 将流动站测得的WGS-84 坐标转换为地方坐标系坐标的方法,与前面快速静态相对定位 中所述方法相同。
准动态相对定位的应用范围:开阔地区的控制点加密测量、普通工程定位、剖面测量、 路线测量、地籍测量、碎部测量以及边界测量等。
尊敬的访客:如果您想了解或购买GPS定位 防盗产品,请点击下方按钮联系我们


您也可以直接拨打客服热线:4007-888-200
推荐阅读:
GPS应用于大型设备的超精密安装
GPS定位技术在精密工程测量中的应用
GPS定位技术在普通工程测量中的应用
GPS技术在工程测量中的应用
GPS定位在大地(控制)测量方面的应用



